车载高精定位技术的三大发展趋势 计算机软硬件技术开发的融合与创新
随着智能驾驶从L2向L3及以上级别迈进,高精度定位技术已成为确保行车安全与功能实现的核心基石。它不仅需要提供厘米级甚至毫米级的绝对位置信息,还必须具备极高的可靠性、实时性与抗干扰能力。在这一演进过程中,计算机软硬件技术的深度开发与协同创新,正引领着车载高精定位技术向更融合、更智能、更强大的方向发展。本文将探讨当前及未来该领域的三大核心发展趋势。
趋势一:多源融合与高算力异构计算平台
传统的单一GNSS(全球导航卫星系统)定位在复杂城市峡谷、隧道等环境中极易失效。因此,融合GNSS、惯性导航(IMU)、激光雷达点云匹配、视觉里程计、高精度地图以及车辆轮速、转向角等多源信息,已成为高精定位系统的标准配置。这对底层计算硬件提出了严峻挑战。
硬件开发层面,专用的高性能、低功耗、车规级SoC(系统级芯片)成为关键。这些芯片集成了强大的CPU、GPU,以及为特定传感器融合算法优化的NPU(神经网络处理单元)和DSP(数字信号处理器),构成异构计算架构。例如,通过NPU加速视觉SLAM(同步定位与地图构建)中的特征提取与匹配,通过DSP高效处理IMU的原始数据滤波。
软件开发层面,则需要与之匹配的、高度优化的融合算法框架与中间件。这包括高效的传感器数据同步、时间戳对齐、坐标系统一管理,以及基于因子图优化或卡尔曼滤波族的紧耦合/松耦合融合算法。开发重点在于如何利用异构计算平台的并行处理能力,在严苛的功耗和时延预算内,实现多源数据的最优状态估计。
趋势二:云端协同与高精度众源地图的实时构建
“车-路-云”一体化是智能网联汽车的必然趋势,高精定位也不例外。未来的定位系统将不再是车辆的孤立能力,而是与云端基础设施深度协同的网络化服务。
硬件端,车辆需要具备强大的V2X(车联万物)通信模块(如5G/5G-V2X、C-V2X),以及足够的本地存储与预处理能力,用于缓存和初步处理定位相关数据。
软件与系统开发的核心在于云端协同定位(Cloud-Enhanced Positioning)技术。车辆将自身的多传感器感知数据(如特征点、局部点云)与云端存储的超高精度动态地图进行实时匹配与比对。云端可以汇聚海量车辆众包数据,利用强大的云计算能力,近乎实时地构建和更新包含车道级几何、语义信息及动态事件(如施工、事故)的“活地图”,并下发给车辆,作为定位的强先验信息。云端还可提供广域增强服务(如星基/地基增强),校正GNSS误差。这种模式极大地扩展了单车传感器的感知边界,提升了在GNSS拒止环境下的定位鲁棒性和精度。
趋势三:AI深度赋能与抗干扰能力的内生安全
环境的高度动态和复杂性(如移动物体遮挡、天气变化、电磁干扰)是高精定位面临的主要挑战。人工智能,特别是深度学习技术,正被深度集成到定位系统的软硬件栈中,以赋予其更强的环境理解与抗干扰能力。
在硬件层面,如前所述,支持AI计算的专用加速器(如NPU、TPU)已成为新一代定位计算平台的标配。其设计需要平衡算力、能效和实时性,支持主流深度学习框架的模型高效部署与推理。
在软件算法层面,AI的应用日益广泛且深入:
1. 感知增强:利用深度学习进行更鲁棒的视觉特征提取与匹配,识别并剔除动态物体对点云或图像匹配的干扰。
2. 场景理解与定位:直接训练端到端的神经网络,输入图像或点云,输出车辆在高精度地图中的位姿,减少对传统几何匹配算法的依赖。
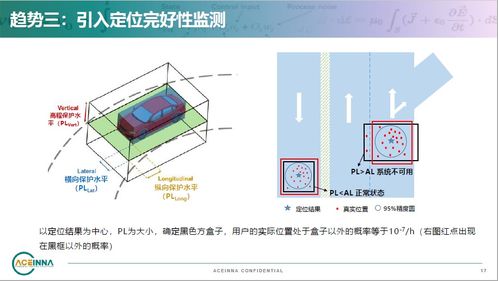
3. 故障诊断与完好性监测:通过AI模型实时分析多传感器数据流,预测或诊断某个传感器(如GNSS)是否受到欺骗或干扰,并评估当前定位结果的可信度(完好性),这对于功能安全(ISO 26262)至关重要。
4. 自适应融合:利用强化学习等技术,让融合算法能够根据当前环境(如城市、高速、雨天)动态调整不同传感器的置信权重,实现最优自适应融合。
###
车载高精定位技术的发展,已从追求单一技术指标的突破,转变为以计算机软硬件协同开发为基础的 “融合感知、协同计算、智能决策” 的系统性工程。多源融合依赖高算力异构平台,云端协同构建了定位的“数字底座”,而AI的深度赋能则让定位系统具备了应对复杂世界的“智慧”。随着芯片制程、算法效率与通信技术的持续进步,高精定位将变得更加可靠、普惠,成为推动高级别自动驾驶大规模落地的关键使能器。
如若转载,请注明出处:http://www.qcwandian.com/product/59.html
更新时间:2026-06-18 08:12:14